Vector Inverse Park transform
- __STATIC_FORCEINLINE void riscv_inv_park_f32 (float32_t Id, float32_t Iq, float32_t *pIalpha, float32_t *pIbeta, float32_t sinVal, float32_t cosVal)
- __STATIC_FORCEINLINE void riscv_inv_park_q31 (q31_t Id, q31_t Iq, q31_t *pIalpha, q31_t *pIbeta, q31_t sinVal, q31_t cosVal)
- group Vector Inverse Park transform
Inverse Park transform converts the input flux and torque components to two-coordinate vector.
The function operates on a single sample of data and each call to the function returns the processed output. The library provides separate functions for Q31 and floating-point data types.
- Algorithm
where
pIalphaandpIbetaare the stator vector components,IdandIqare rotor vector components andcosValandsinValare the cosine and sine values of theta (rotor flux position).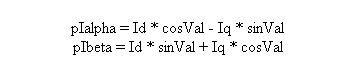
- Fixed-Point Behavior
Care must be taken when using the Q31 version of the Park transform. In particular, the overflow and saturation behavior of the accumulator used must be considered. Refer to the function specific documentation below for usage guidelines.
Functions
- __STATIC_FORCEINLINE void riscv_inv_park_f32 (float32_t Id, float32_t Iq, float32_t *pIalpha, float32_t *pIbeta, float32_t sinVal, float32_t cosVal)
Floating-point Inverse Park transform.
- Parameters:
Id – [in] input coordinate of rotor reference frame d
Iq – [in] input coordinate of rotor reference frame q
pIalpha – [out] points to output two-phase orthogonal vector axis alpha
pIbeta – [out] points to output two-phase orthogonal vector axis beta
sinVal – [in] sine value of rotation angle theta
cosVal – [in] cosine value of rotation angle theta
- __STATIC_FORCEINLINE void riscv_inv_park_q31 (q31_t Id, q31_t Iq, q31_t *pIalpha, q31_t *pIbeta, q31_t sinVal, q31_t cosVal)
Inverse Park transform for Q31 version.
- Scaling and Overflow Behavior
The function is implemented using an internal 32-bit accumulator. The accumulator maintains 1.31 format by truncating lower 31 bits of the intermediate multiplication in 2.62 format. There is saturation on the addition, hence there is no risk of overflow.
- Parameters:
Id – [in] input coordinate of rotor reference frame d
Iq – [in] input coordinate of rotor reference frame q
pIalpha – [out] points to output two-phase orthogonal vector axis alpha
pIbeta – [out] points to output two-phase orthogonal vector axis beta
sinVal – [in] sine value of rotation angle theta
cosVal – [in] cosine value of rotation angle theta